@Geisonik  Geisonik schrieb:Solche Systeme können nun mal ausfallen.
Geisonik schrieb:Solche Systeme können nun mal ausfallen.
ja, aber dafür gibt es dann ja die redundanz. ohne jene wird es in diesem falle nicht gehen.
Geisonik schrieb:Wer bezahlt und Haftet bei Unfall ;)
eben weil wir a) noch nicht so weit sind, sodass b) sich entsprechende organe (versicherungen ...) zusammen mit den oems und dem gesetzgeber sich auf ein regel-&verfahrenskatalog einigen können.
Geisonik schrieb:Machbar ist das, es ist eine Reihe an Auswertungen die in Echtzeit gefahren werden müssen, heutige Rechner schaffen das ohne Probleme.
Das Problem würde wohl eher darin liegen das ein Computer an sich dumm ist. Er ist nur so schlau wie der der ihm was beibringt
in echtzeit daten sammeln über zig versch. sensoren ist nicht das problem. aber dann kommt es auf den interpreteralgorithmus an, wie du schon richtig sagst, nur so schlau sein kann, wie jener, der ihn programmiert hat!
in der industrie haben wir hier im moment die grössten schwierigkeiten darin, diese anzahl von sensoren zu einem zu fusionieren! hinzu kommt die unglaublich grosse anzahl von raw-data in kürzester zeit. (soweit ich informiert bin, bringt es z.b. google´s av in der sekunde(!) auf über ein gb an daten.) und das muss innerhalb einer ultrakurzen zeitspanne im system rekonstruiert werden, um entsprechend darauf eine entscheidung fällen zu können.
plus die geschw. mit der sich das umfeld ändert. darauf muss das system genauso flott reagieren können.
schwierigkeiten in der präzision & richtigkeit bringen das gps und dessen information (dass kann dann wiederum mit entspr. algorithmen korrigiert werden (hypothesenalg.), ausfall dessen (dann springt das inertialsystem des fzg.es ein). weitere wären dann noch sensoranfälligkeit gegen störungen (elektro-magnetische interferenzen insbesondere.) verschärft kann dieses problem durch interferenzen anderer av in der umgebung -
:D. sprich ein standard ist unabdingbar!
in kürze noch erwähnt: komponentenzuverlässigkeit über die jahre hinweg, mensch-maschine kommunikation (wichtig bei gekoppelter entscheidungsfindung!), ...
simpel ausgedrückt funktioniert ein av nach folgendem schema (four-step loop):
1. umgebungserfassung mit allen variablen (mit lidar, radar, ir, passiven cameras + intelligenten cameras ...) und dessen rekonstruktion im "system".
2. "entschlüsselung" der gesamten daten. wo bin ich (das system also) im vergleich zu anderen verkehrsteilnehmern resp. der umgebung (geschw., gps, ...)
3. aktionen für den nächsten schritt wird geplant & die entscheidungsfällung "was mache ich jetzt". und hier beginnt die schwierigkeit beim automatisierten fahren. die daten verschiedenster sensoren müssen zu einem/mehreren (logik)interpreter/n fusioniert werden. bis schlussendlich eine aktion (bestehend aus mehreren anderen teilaktionen) durchgeführt werden kann.
4. ausführung der aktion.
Geisonik schrieb:Auf einer Strecke die frei von solchen Auswirkungen ist, zB weil es nur dieses eine Auto gibt und kein weiteres das Verunreinigung oder ähnliches produzieren kann, wäre ein Computer gesteuerter Wagen der im Vorfeld Streckeninfos immer aktuelle Wettergeschehnisse und Statusberichte der Technik zur Verfügung hat, die man per Sensor in Echtzeit übertragen könnte, mit Sicherheit schneller als jemals ein Mensch diese Strecke fahren würde (Außer vielleicht der Mensch ist verrückt und Lebensmüde oder so^^)
in einer sumulation kann man das, wie schon erwähnt, simulieren, aber in der realität mit dynamischen, sich ständig wechselnden faktoren, eben nicht.
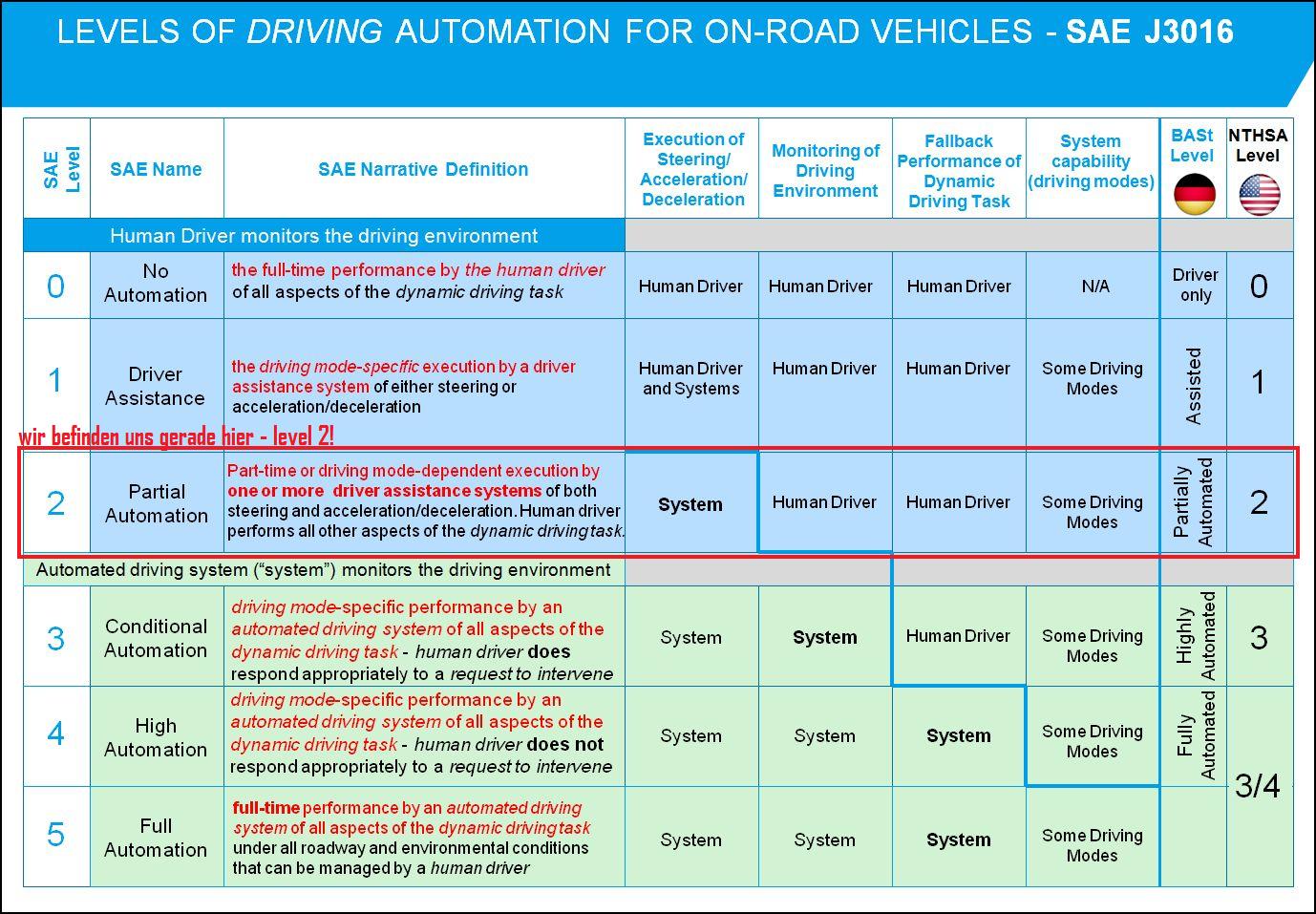
kategorisierung in der industrie (nach sae, bast & nhtsa):
->
 Original anzeigen (0,2 MB)
Original anzeigen (0,2 MB)0,1,2 ... driver in the loop (mit den heutigen fahrassistenz- & fahrerassistenzsystemen)
3,4,5 ... driver out of the loop (noch nicht gesetzlich erlaubt, ist in vorbereitung)
grob gesagt wird es noch 1,2 dekaden dauern, bis wir level 4/5 erreicht haben (v2v & v2i(x) muss ohne wenn und aber einwandfrei funktionieren (v2v ... vehicle-2-vehicle kommunikation, v2i(x) ... vehicle-2-infrastructure komm..).