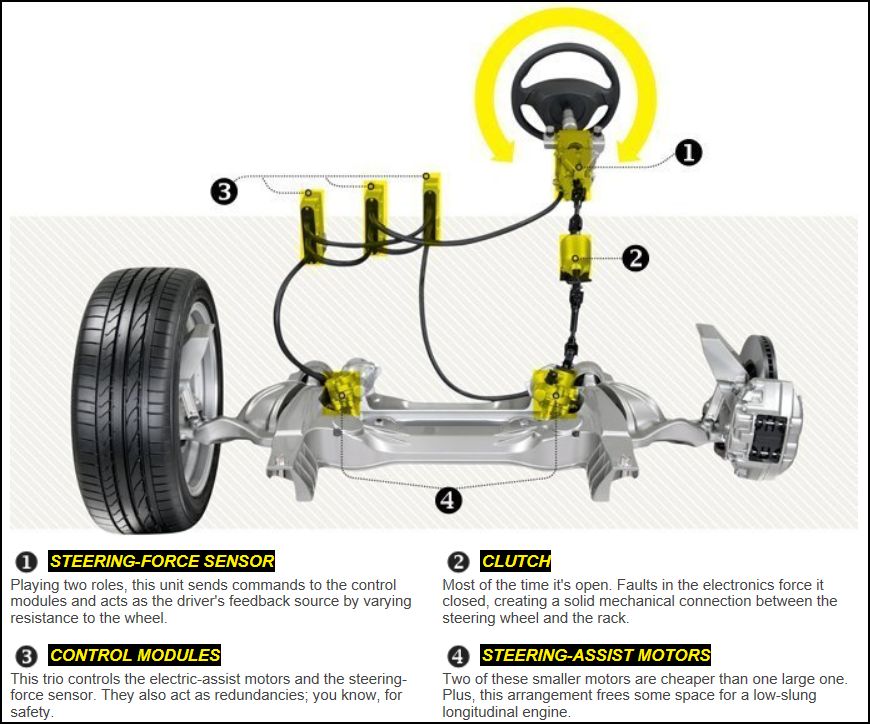
die 3 ecu´s darf man hier nicht als die typische, dreifache redundanzstruktur interpretieren!
man benötigt deshalb 3 ecus, weil man anhand einer nicht feststellen kann, welches system (winkelsensoren, aktuatoren, e-motoren) falsche werte z.b. liefert. deshalb diese anzahl von ecus (3x) & winkelsensoren (3x o.6x). => mehrheitsentscheider (2 von 3), entscheiden über die "richtigen" werte.
die rückmeldungen von der strasse werden über ein force-feedback-system realisiert, da ansonsten das lenkgefühl sehr steril sein dürfte.
vorteile des systems:
- die elektr. lenkung übt selbständig kleinere korrekturen aus -> fahrerermüdung soll sich dadurch verringern.
- ebenso wird bei querwinden die richtungstabilität verbessert & eingehalten.
- vibrationen kommend vom fahrbelag werden so gut es geht geglättet.
- ebenso werden die daten wie schlupf und gripzustand an die ecu weitergegeben.
- system arbeitet zusammen mit der frontcamera (überwachung des fahrzustandes & datenaustausch mit der ecu)
- bei einer neigung der strasse wird der geradeauslauf - wenn nötig - beibehalten.
- gleichzeitig kann dadurch ein kollisionvermeidungssystem bei einer notsituation realisiert werden. (-> nissan avoidance system)
+
- wenn man die lenksäule komplett weglassen würde, könnte man das lenkrad "weicher" lagern
(->kollision)
- und man könnte die anordnung des motors und der peripherie im motorraum besser gestalten!
- weniger aufwand bei der produktion von links- & rechtslenker.
-->> aber:
all die vorteile haben auch einen negativen aspekt. der fahrer "verlernt" teilweise das selbständige lenken!
weiterer grosser nachteil ist das zusätzliche gewicht dieses systems, anstelle der "ordinären" mechanischen (elektro-) lenkung!

 Kaufte den Occasion aus erster Hand, der Preis war wirklich gut. Geld für nen Neuen hatte ich nicht. So fertig, muss aufhören hier, es ist völlig Offtopic.
Kaufte den Occasion aus erster Hand, der Preis war wirklich gut. Geld für nen Neuen hatte ich nicht. So fertig, muss aufhören hier, es ist völlig Offtopic.